Understanding this post requires reading Part I where I explain what reduced paths are and how we might go about proving they exist. In this second part, I’ll go into detail about how to use Zorn’s lemma to identifying a maximal cancellation and therefore ensure every path is path-homotopic to a reduced path. The argument we’ll use is a generalization of Cannon and Conner’s [3, Theorem 3.9], which is based on Curtis and Fort’s original argument in [4, Lemma 3.1]. Both of those papers restrict only to one-dimensional spaces and here we’re going to include lots of other spaces using a definition introduced in [2]. While writing this post, I’ve been surprised at how far the argument can be generalized.
We’ll use the same notation as in Part I:  is a space,
is a space, ![\alpha:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Calpha%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) is a non-constant path, and
is a non-constant path, and  is the partially ordered set of cancellations of
is the partially ordered set of cancellations of  .
.
When can we be sure that pinching off null homotopic loops on a maximal cancellation results in a reduced loop?
At the start of Part I, I gave some examples of familiar spaces where some or all homotopy classes of loops failed to have any reduced representative. This means in order to continue this discussion, we must identify some hypothesis on that will allow us to move forward. The following definition has shown up in my work a good bit in the past two years. Curiously, it’s popping up again in a natural way. To distinguish notation, note that  denotes the fundamental group and
denotes the fundamental group and  denotes the fundamental groupoid.
denotes the fundamental groupoid.
Definition 8: A space has well-defined transfinite -products if for any closed set ![A \subseteq [0,1]](https://s0.wp.com/latex.php?latex=A+%5Csubseteq+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) containing
containing  and paths
and paths ![\alpha,\beta:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Calpha%2C%5Cbeta%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) such that
such that  and
and ![\alpha|_{[a,b]}\simeq \beta|_{[a,b]}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Ba%2Cb%5D%7D%5Csimeq+%5Cbeta%7C_%7B%5Ba%2Cb%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) for every component
for every component  of
of ![[0,1]\backslash A](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D%5Cbackslash+A&bg=ffffff&fg=333333&s=0&c=20201002) , we have
, we have  .
.
This definition says that all infinite product operations ![\{[\alpha_j]\}_{j\in L}\mapsto \prod_{j\in L}[\alpha_j]](https://s0.wp.com/latex.php?latex=%5C%7B%5B%5Calpha_j%5D%5C%7D_%7Bj%5Cin+L%7D%5Cmapsto+%5Cprod_%7Bj%5Cin+L%7D%5B%5Calpha_j%5D&bg=ffffff&fg=333333&s=0&c=20201002) (indexed by any countable linear order
(indexed by any countable linear order  ) in the fundamental groupoid
) in the fundamental groupoid  are well-defined on homotopy classes: homotopic factors result in homotopic products. For instance, in the case that
are well-defined on homotopy classes: homotopic factors result in homotopic products. For instance, in the case that  , having well-defined transfinite products means that if we have path-homotopies
, having well-defined transfinite products means that if we have path-homotopies  ,
,  ,
,  ,… and we can form the infinite concatenations , then we have
,… and we can form the infinite concatenations , then we have  (see the figure below). Why this is a hypothesis (and doesn’t just always happen for free) is because you may have no control over the size of the homotopies
(see the figure below). Why this is a hypothesis (and doesn’t just always happen for free) is because you may have no control over the size of the homotopies  and you need them to shrink in order to form a continuous homotopy on the product.
and you need them to shrink in order to form a continuous homotopy on the product.

If the space has well-defined infinite products (a special case of transfinite products) then if the top (blue) paths can be deformed into the bottom (red) paths individually, then the entire top path can be homotoped to the entire bottom path.
The set  in the definition could be the Cantor set, which means that we also need to consider the scenario in which the components of are densely ordered. That’s the worst case scenario, which is still not so bad, since there can only be countably many components. Spaces with well-defined transfinite -products abound, including one-dimensional spaces, planar sets, and lots of other spaces where “small null-homotopic loops are bounded by small disks.”
in the definition could be the Cantor set, which means that we also need to consider the scenario in which the components of are densely ordered. That’s the worst case scenario, which is still not so bad, since there can only be countably many components. Spaces with well-defined transfinite -products abound, including one-dimensional spaces, planar sets, and lots of other spaces where “small null-homotopic loops are bounded by small disks.”
One remarkable thing about Definition 8 is that, for metrizable , this slightly-more-algebraic-flavored property is equivalent to admitting a generalized universal covering space . I haven’t had a chance to write about those yet, but they’re expected to be the primary tool for understanding wild higher homotopy groups.
Lemma 9 (Construction of reduced paths): Suppose has transfinite -products, is a path,  is a maximal cancellation for a and
is a maximal cancellation for a and ![A=[0,1]\backslash\bigcup\mathscr{M}](https://s0.wp.com/latex.php?latex=A%3D%5B0%2C1%5D%5Cbackslash%5Cbigcup%5Cmathscr%7BM%7D&bg=ffffff&fg=333333&s=0&c=20201002) . If
. If ![\beta:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Cbeta%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) is the path induced by a collapse function
is the path induced by a collapse function ![r:[0,1]\to[0,1]](https://s0.wp.com/latex.php?latex=r%3A%5B0%2C1%5D%5Cto%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) for
for  , i.e.
, i.e.  , then
, then  is reduced and .
is reduced and .
Proof. Recall that since is maximal any two open intervals, which are elements of must have disjoint closures. Let ![A=[0,1]\backslash \bigcup\mathscr{M}](https://s0.wp.com/latex.php?latex=A%3D%5B0%2C1%5D%5Cbackslash+%5Cbigcup%5Cmathscr%7BM%7D&bg=ffffff&fg=333333&s=0&c=20201002) so that is the set of connected components of . Let
so that is the set of connected components of . Let ![\gamma:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Cgamma%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) be the path, defined as on and constant on each element of (just like in the Pinching-off Lemma in Part I). If
be the path, defined as on and constant on each element of (just like in the Pinching-off Lemma in Part I). If  , then
, then ![\alpha|_{[a,b]}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Ba%2Cb%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) and
and ![\gamma|_{[a,b]}](https://s0.wp.com/latex.php?latex=%5Cgamma%7C_%7B%5Ba%2Cb%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) are both null-homotopic. So of course,
are both null-homotopic. So of course, ![\alpha|_{[a,b]}\simeq\gamma|_{[a,b]}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Ba%2Cb%5D%7D%5Csimeq%5Cgamma%7C_%7B%5Ba%2Cb%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) . Therefore, since is assumed to have well-defined transfinite -products, we have
. Therefore, since is assumed to have well-defined transfinite -products, we have  . Now by Lemma 2 in Part I, we may find a collapse function
. Now by Lemma 2 in Part I, we may find a collapse function  for and a nowhere constant path such that
for and a nowhere constant path such that  . As pointed out in the comment after Lemma 2, we have
. As pointed out in the comment after Lemma 2, we have  . Therefore, .
. Therefore, .
Finally, we need to make sure that is reduced. Suppose to the contrary that there are  such that
such that ![\beta|_{[c,d]}](https://s0.wp.com/latex.php?latex=%5Cbeta%7C_%7B%5Bc%2Cd%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) is a null-homotopic loop. Find
is a null-homotopic loop. Find ![c',d'\in A=[0,1]\backslash \bigcup\mathscr{M}](https://s0.wp.com/latex.php?latex=c%27%2Cd%27%5Cin+A%3D%5B0%2C1%5D%5Cbackslash+%5Cbigcup%5Cmathscr%7BM%7D&bg=ffffff&fg=333333&s=0&c=20201002) such that
such that  and
and  and
and  . Since
. Since ![\gamma|_{[c',d']}=\beta|_{[c,d]}\circ r|_{[c',d']}](https://s0.wp.com/latex.php?latex=%5Cgamma%7C_%7B%5Bc%27%2Cd%27%5D%7D%3D%5Cbeta%7C_%7B%5Bc%2Cd%5D%7D%5Ccirc+r%7C_%7B%5Bc%27%2Cd%27%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) , it must be that
, it must be that ![\gamma|_{[c',d']}](https://s0.wp.com/latex.php?latex=%5Cgamma%7C_%7B%5Bc%27%2Cd%27%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) is a null-homotopic loop. But remember that
is a null-homotopic loop. But remember that ![\alpha|_{[c',d']}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Bc%27%2Cd%27%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) agrees with on
agrees with on ![[c',d']\backslash\bigcup\mathscr{M}](https://s0.wp.com/latex.php?latex=%5Bc%27%2Cd%27%5D%5Cbackslash%5Cbigcup%5Cmathscr%7BM%7D&bg=ffffff&fg=333333&s=0&c=20201002) and on any
and on any  that happens to lie in the interior of
that happens to lie in the interior of ![[c',d']](https://s0.wp.com/latex.php?latex=%5Bc%27%2Cd%27%5D&bg=ffffff&fg=333333&s=0&c=20201002) , is null-homotopic and
, is null-homotopic and  is constant. We once again apply the assumption that has well-defined transfinite -products to see that
is constant. We once again apply the assumption that has well-defined transfinite -products to see that ![\alpha|_{[c',d']}\simeq\gamma|_{[c',d']}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Bc%27%2Cd%27%5D%7D%5Csimeq%5Cgamma%7C_%7B%5Bc%27%2Cd%27%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) . Hence, is a null-homotopic loop. This allows us to define
. Hence, is a null-homotopic loop. This allows us to define ![\mathscr{M}'=\{(I\in\mathscr{M}\mid I\cap [c',d']=\emptyset\}\cup \{(c',d')\}](https://s0.wp.com/latex.php?latex=%5Cmathscr%7BM%7D%27%3D%5C%7B%28I%5Cin%5Cmathscr%7BM%7D%5Cmid+I%5Ccap+%5Bc%27%2Cd%27%5D%3D%5Cemptyset%5C%7D%5Ccup+%5C%7B%28c%27%2Cd%27%29%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) . Let’s see why this gives us a contradiction.
. Let’s see why this gives us a contradiction.
If there was no contained in  or if there is some such that
or if there is some such that  is a proper subset of , then
is a proper subset of , then  is a strictly larger cancellation than . This would violate the maximality of . Because
is a strictly larger cancellation than . This would violate the maximality of . Because  , the only other possibility is that
, the only other possibility is that  . However this would mean that
. However this would mean that ![r([c',d'])](https://s0.wp.com/latex.php?latex=r%28%5Bc%27%2Cd%27%5D%29&bg=ffffff&fg=333333&s=0&c=20201002) is a point, contradicting the assumption that
is a point, contradicting the assumption that  . Either way, we run into a problem. So it must be that is reduced.
. Either way, we run into a problem. So it must be that is reduced. 
Comment about understanding Lemma 9: Lemma 9 is packed with terminology from Part I so here’s how you can think about it. As long as has this well-defined products property, then given any maximal cancellation  , we can delete the subloops of defined on the components of (each of which is null-homotopic). I wrote the statement of Lemma 9 to avoid the case where itself is a null-homotopic loop. In that case, and won’t exist and you can always represent with the constant loop anyway.
, we can delete the subloops of defined on the components of (each of which is null-homotopic). I wrote the statement of Lemma 9 to avoid the case where itself is a null-homotopic loop. In that case, and won’t exist and you can always represent with the constant loop anyway.
When do maximal cancellations exist?
Ok, so this is the last piece of the puzzle and this is the one that requires Zorn’s Lemma. What we’re trying to do is start with a path and show that the partially ordered set of all cancellations of has a maximal element. So this is ripe for an application of Zorn’s Lemma, which is equivalent to the Axiom of Choice. You shouldn’t really expect this to work without Zorn’s lemma because maximal cancellations are not unique and very much are like choosing a contraction of a tree.
One again, the well-definedness property from Definition 9 is the natural hypothesis to complete the proof.
Lemma 10 (Existence of Maximal Cancellations): Suppose has well-defined transfinite -products and is a non-constant path. Then there exists a maximal cancellation for .
Proof. Let  be a linearly ordered subset of the partially ordered set . The result will follow from Zorn’s Lemma, if we can show that is bounded above in . Let
be a linearly ordered subset of the partially ordered set . The result will follow from Zorn’s Lemma, if we can show that is bounded above in . Let  . In otherwords, just union all of the open intervals together. Take be the set of connected components of
. In otherwords, just union all of the open intervals together. Take be the set of connected components of  . The main thing we’ll need to do is prove that is a cancellation. However, once this is done it’s not too hard to see that
. The main thing we’ll need to do is prove that is a cancellation. However, once this is done it’s not too hard to see that  in for all
in for all  .
.
The trickier part is showing that is a cancellation, i.e. that is a null-homotopic loop for all . Let’s fix such a connected component of . Notice that  . We need to pause and proof the following claim.
. We need to pause and proof the following claim.
Claim: For every closed interval ![[c,d]\subseteq (a,b)](https://s0.wp.com/latex.php?latex=%5Bc%2Cd%5D%5Csubseteq+%28a%2Cb%29&bg=ffffff&fg=333333&s=0&c=20201002) , there exists a
, there exists a  and
and  such that
such that ![[c,d]\subseteq (x,y)\subseteq (a,b)](https://s0.wp.com/latex.php?latex=%5Bc%2Cd%5D%5Csubseteq+%28x%2Cy%29%5Csubseteq+%28a%2Cb%29&bg=ffffff&fg=333333&s=0&c=20201002) .
.
Proof of Claim. Fix . For each ![t\in [c,d]](https://s0.wp.com/latex.php?latex=t%5Cin+%5Bc%2Cd%5D&bg=ffffff&fg=333333&s=0&c=20201002) , we have
, we have  and so there exists
and so there exists  and
and  such that
such that  . Now
. Now ![\{I_t\mid t\in [c,d]\}](https://s0.wp.com/latex.php?latex=%5C%7BI_t%5Cmid+t%5Cin+%5Bc%2Cd%5D%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) is an open cover of the compact space
is an open cover of the compact space ![[c,d]](https://s0.wp.com/latex.php?latex=%5Bc%2Cd%5D&bg=ffffff&fg=333333&s=0&c=20201002) by open sets in and so we may find a finite subcover
by open sets in and so we may find a finite subcover  . Since
. Since  is a linear order,
is a linear order,  exists. For
exists. For ![s\in [c,d]](https://s0.wp.com/latex.php?latex=s%5Cin+%5Bc%2Cd%5D&bg=ffffff&fg=333333&s=0&c=20201002) , we have
, we have  for some
for some  and since
and since  , we have
, we have  for some
for some  . We must have
. We must have  since .
since .
Equipped with this now-proven Claim, we’re really going places. Start with some ![[c_1,d_1]\subseteq (a,b)](https://s0.wp.com/latex.php?latex=%5Bc_1%2Cd_1%5D%5Csubseteq+%28a%2Cb%29&bg=ffffff&fg=333333&s=0&c=20201002) . Find
. Find

such that  and
and  . Using the Claim, for every
. Using the Claim, for every  , we may find
, we may find  and
and  such that
such that ![[c_n,d_n]\subseteq (x_n,y_n)\subseteq (a,b)](https://s0.wp.com/latex.php?latex=%5Bc_n%2Cd_n%5D%5Csubseteq+%28x_n%2Cy_n%29%5Csubseteq+%28a%2Cb%29&bg=ffffff&fg=333333&s=0&c=20201002) . This means that:
. This means that:


- Since each
 is a cancellation,
is a cancellation, ![\alpha|_{[x_n,y_n]}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Bx_n%2Cy_n%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) is a null-homotopic loop!
is a null-homotopic loop!
Important early observation: Since the sequence  converges to both
converges to both  and
and  and we’ve assumed from the start that is Hausdorff, it must be the case that
and we’ve assumed from the start that is Hausdorff, it must be the case that  . All of the basepoints involved might be different but that’s ok… we’ll still work it out.
. All of the basepoints involved might be different but that’s ok… we’ll still work it out.
Define
![\gamma_m=\begin{cases} \alpha|_{[y_{m},y_{m+1}]} , &\text{ if }m\geq 1 \\ \alpha|_{[x_1,y_1]} , &\text{ if }m=0 \\ \alpha|_{[x_{-m-1},x_{-m}]}, &\text{ if }m\leq -1 \end{cases}](https://s0.wp.com/latex.php?latex=%5Cgamma_m%3D%5Cbegin%7Bcases%7D+%5Calpha%7C_%7B%5By_%7Bm%7D%2Cy_%7Bm%2B1%7D%5D%7D+%2C+%26%5Ctext%7B+if+%7Dm%5Cgeq+1+%5C%5C+%5Calpha%7C_%7B%5Bx_1%2Cy_1%5D%7D+%2C+%26%5Ctext%7B+if+%7Dm%3D0+%5C%5C+%5Calpha%7C_%7B%5Bx_%7B-m-1%7D%2Cx_%7B-m%7D%5D%7D%2C+%26%5Ctext%7B+if+%7Dm%5Cleq+-1+%5Cend%7Bcases%7D&bg=ffffff&fg=333333&s=0&c=20201002)
Warning: It is possible that  or
or  . In fact, we could have
. In fact, we could have  and/or
and/or  for sufficiently large
for sufficiently large  . To make sure that this proof doesn’t require a bunch of tedious cases, we allow
. To make sure that this proof doesn’t require a bunch of tedious cases, we allow ![\alpha|_{[p,q]}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Bp%2Cq%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) to mean the constant loop at
to mean the constant loop at  when
when  .
.
Now, is homotopic to the  -indexed concatenation
-indexed concatenation  . At worst, we’re inserting a sequence of constant subpaths and reparameterizing, which never changes the path-homotopy class.
. At worst, we’re inserting a sequence of constant subpaths and reparameterizing, which never changes the path-homotopy class.

Now we go back and use that third bullet point. First, ![\gamma_0=\alpha|_{[x_1,y_1]}](https://s0.wp.com/latex.php?latex=%5Cgamma_0%3D%5Calpha%7C_%7B%5Bx_1%2Cy_1%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) is null-homotopic. Also, for
is null-homotopic. Also, for  , we have
, we have ![[\alpha|_{[x_{n+1},y_{n+1}]}]= [\gamma_{-n}][\alpha|_{[x_n,y_n]}][\gamma_{n}]](https://s0.wp.com/latex.php?latex=%5B%5Calpha%7C_%7B%5Bx_%7Bn%2B1%7D%2Cy_%7Bn%2B1%7D%5D%7D%5D%3D+%5B%5Cgamma_%7B-n%7D%5D%5B%5Calpha%7C_%7B%5Bx_n%2Cy_n%5D%7D%5D%5B%5Cgamma_%7Bn%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) where and
where and ![\alpha|_{[x_{n+1},y_{n+1}]}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Bx_%7Bn%2B1%7D%2Cy_%7Bn%2B1%7D%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002) are null-homotopic loops. Hence
are null-homotopic loops. Hence  for all .
for all .
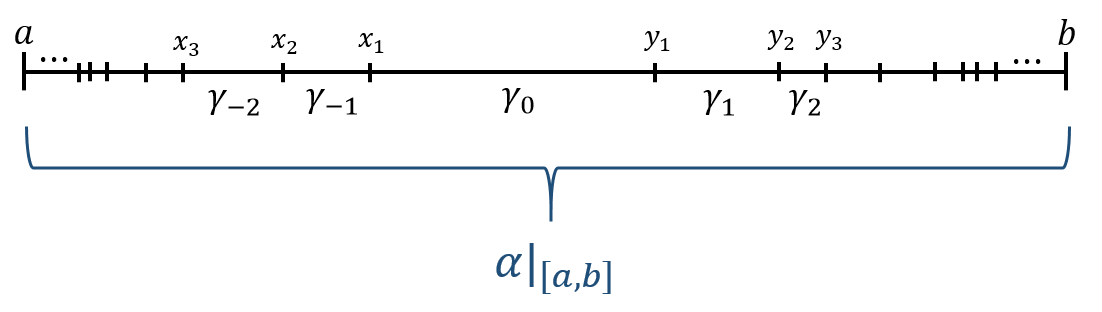
Define ![\beta:[a,b]\to X](https://s0.wp.com/latex.php?latex=%5Cbeta%3A%5Ba%2Cb%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) to be the loop, which is defined as
to be the loop, which is defined as  on
on ![[x_1,y_1]](https://s0.wp.com/latex.php?latex=%5Bx_1%2Cy_1%5D&bg=ffffff&fg=333333&s=0&c=20201002) ,
,  on
on ![[y_n,y_{n+1}]](https://s0.wp.com/latex.php?latex=%5By_n%2Cy_%7Bn%2B1%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and  on
on ![[x_{n+1},x_{n}]](https://s0.wp.com/latex.php?latex=%5Bx_%7Bn%2B1%7D%2Cx_%7Bn%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
.

Notice that  is closed and and for every component latex of
is closed and and for every component latex of ![[a,b]\backslash A](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D%5Cbackslash+A&bg=ffffff&fg=333333&s=0&c=20201002) , we have
, we have  . Therefore, since is assumed to have well-defined transfinite -products, we have
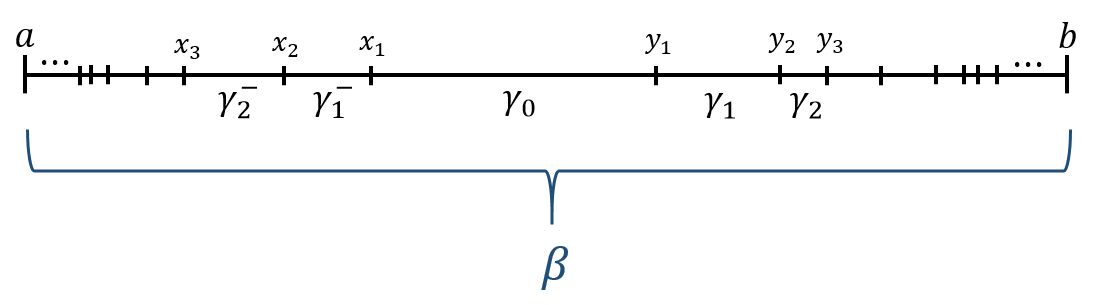
. Therefore, since is assumed to have well-defined transfinite -products, we have ![\alpha|_{[a,b]}\simeq\beta](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Ba%2Cb%5D%7D%5Csimeq%5Cbeta&bg=ffffff&fg=333333&s=0&c=20201002) . However, is a reparemeterization of the path conjugate
. However, is a reparemeterization of the path conjugate  of the null-homotopic loop . Since is a null-homotopic loop, it follows that is null-homotopic.
of the null-homotopic loop . Since is a null-homotopic loop, it follows that is null-homotopic.
Whew! Let’s put a little square here and be done with it.
An observation for those familiar with the Homotopically Hausdorff property: The well-defined transfinite products property is required when you run into densely ordered products. We really only needed products indexed by the naturals in the proof of Lemma 10. The subtleties of well-defined infinite path/loop products are studied in detail in [1] and are shown to be equivalent to the homotopically Hausdorff property when is first countable. So Lemma 10 could be strengthened as follows: Suppose is first countable and homotopically Hausdorff and is a non-constant path. Then there exists a maximal cancellation for .
Putting it all together
Finally, combining Lemmas 9 and 10, we finish off the existence of reduced paths.
Theorem 11: If has well-defined transfinite -products, then every path in is path-homotopic to a reduced path induced by deleting subloops on a maximal cancellation.
Proof. If is a null-homotopic loop, then the constant loop is the desired reduced representative. Otherwise, is a non-constant path. Lemma 10 ensures that contains a maximal cancellation . Lemma 9 ensures that if and is the path induced by a collapse function for (these details were laid out in Part I), then is reduced and .
What else is there to wonder about?
To what extent are reduced representatives of paths unique? In general, there is definitely no uniqueness within homotopy classes – recall the cylinder example from Part I. Even relative to the subloop deletion construction, the result won’t be unique. For suppose that ![\gamma_1,\gamma_2:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Cgamma_1%2C%5Cgamma_2%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) are reduced paths that are path-homotopic to each other. Then
are reduced paths that are path-homotopic to each other. Then  , reduces to
, reduces to  using the cancellation
using the cancellation  or
or  using the cancellation
using the cancellation  . There is choice involved! That choice will typically result in one of many possible reduced path results. This shouldn’t be too surprising though. It’s a slightly more topological version of the fact that in a group that is not free, shortest representation of an element using finite products of generators may not be unique.
. There is choice involved! That choice will typically result in one of many possible reduced path results. This shouldn’t be too surprising though. It’s a slightly more topological version of the fact that in a group that is not free, shortest representation of an element using finite products of generators may not be unique.
However, I hinted in Part I that for one-dimensional spaces that every path-homotopy class has a unique (up to reparameterization) reduced path – I love this result. Maybe a Part III?
References:
[1] J. Brazas, Scattered products in fundamental groupoids. Proc. Amer. Math. Soc. 148 (2020), no 6, 2655-2670. arXiv
[2] J. Brazas, H. Fischer, Test map characterizations of local properties of fundamental groups. Journal of Topology and Analysis. 12 (2020) 37-85. arXiv
[3] J.W. Cannon, G.R. Conner, On the fundamental groups of one-dimensional spaces, Topology Appl. 153 (2006) 2648–2672.
[4] M.L. Curtis, M.K. Fort, Jr., The fundamental group of one-dimensional spaces, Proc. Amer. Math. Soc. 10 (1959) 140–148.



Pingback: Homotopically Reduced Paths (Part III) | Wild Topology