
The topic of this post focuses on a general concept that is heavily used in the wild topology world. Writing this post has been a fun exploration I’ve been meaning to spend time on for a while now. I will assume that all spaces involved are Hausdorff.
Definition 1: A path ![\alpha:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Calpha%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002)

![[a,b]\subseteq [0,1]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D%5Csubseteq+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![\alpha|_{[a,b]}](https://s0.wp.com/latex.php?latex=%5Calpha%7C_%7B%5Ba%2Cb%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002)
I’ll usually just refer to a homotopically reduced path as a reduced path.
There are some other, more geometric, notions of “homotopically reduced” that are good for other purposes but this one is particularly relevant for one-dimensional spaces. Soon, we’ll combine new stuff with an old post to see that every path in a one-dimensional Hausdorff space is path-homotopic to a unique reduced path (unique up to reparameterization). Just as the uniqueness of reduced words in free groups is central to their theory and applications, the same kind of uniqueness for homotopy classes is important for proving things about fundamental groups of one-dimensional spaces.
History: The idea behind reduced paths in the one-dimensional case is based off of Curtis and Fort’s work in [2] from the 1950’s. I should note that Curtis-Fort use the notion of a “normal loop” which permits constant subpaths and is not exactly the same as in Definition 1. The modern definition of “reduced path,” which is far more effective for applications, does not permit constant subpaths. This modern version appears to appear first in Section 2 of Eda’s 2002 paper [3]. There is also a nice proof in Cannon and Conner’s outstanding 2006 paper [1].
Fun question to ponder: What do you think a homotopically reduced map ![[0,1]^n\to X](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D%5En%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002)

Let’s start with some basic observations.
- A homotopically reduced path
on which
such that
- In general, it’s possible for a path-homotopy class to be represented by many different reduced paths. For instance let
be the cylinder and for
, consider the paths
and
. Now the family of paths
,
are all reduced paths that represent the same path-homotopy class. See the gif below.
A family of reduced loops all representing the same homotopy class.
It’s worth pointing out that the cylinder
is a 2-dimensional space (with whatever notion of topological dimension is your favorite).
- If
is the Griffiths twin cone with basepoint
, then every non-trivial homotopy class
has no reduced representative. This is true since every loop
satisfying
is null-homotopic in

What I’d like to do in this post is discuss the existence of reduced paths in homotopy classes. When can we be sure that a path
Say we start with a non-constant path 

A Lemma about deleting constant subloops
Lemma 2: For every path ![r:[0,1]\to [0,1]](https://s0.wp.com/latex.php?latex=r%3A%5B0%2C1%5D%5Cto+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![\beta:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Cbeta%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002)

Proof. Let 
![t\in[0,1]](https://s0.wp.com/latex.php?latex=t%5Cin%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)





![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)



- for each
.
- if
in
, we use the linear function
. Doing so adds the line segment connecting
and
to the graph of
- If we haven’t defined
yet, then
in
. Therefore, we define
.
A little real analysis will finish the proof that ![r:[0,1]\to[0,1]](https://s0.wp.com/latex.php?latex=r%3A%5B0%2C1%5D%5Cto%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)


The Cantor Function
In general,
Let’s finish this argument. Since
How do we know 











Here’s why that lemma is a useful and necessary starting place: Since 

But….to proceed we should dissect the proof to formalize the idea of “pinching off subloops.”
Definition 3: The function
Notice that if ![A=[0,1]\backslash U](https://s0.wp.com/latex.php?latex=A%3D%5B0%2C1%5D%5Cbackslash+U&bg=ffffff&fg=333333&s=0&c=20201002)
![r(A)=[0,1]](https://s0.wp.com/latex.php?latex=r%28A%29%3D%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
Lemma 4 (Pinch-off Lemma): Suppose ![A\subseteq [0,1]](https://s0.wp.com/latex.php?latex=A%5Csubseteq+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![I\in C([0,1]\backslash A)](https://s0.wp.com/latex.php?latex=I%5Cin+C%28%5B0%2C1%5D%5Cbackslash+A%29&bg=ffffff&fg=333333&s=0&c=20201002)


![[0,1]\backslash A](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D%5Cbackslash+A&bg=ffffff&fg=333333&s=0&c=20201002)

Proof. Suppose 
![\gamma:[0,1]\to X](https://s0.wp.com/latex.php?latex=%5Cgamma%3A%5B0%2C1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002)
![\gamma(t)=\begin{cases} \alpha(t), & \text{ if }t\in A\\ x_I, & \text{ if }t\in I, I\in C([0,1]\backslash A)\end{cases}](https://s0.wp.com/latex.php?latex=%5Cgamma%28t%29%3D%5Cbegin%7Bcases%7D+%5Calpha%28t%29%2C+%26+%5Ctext%7B+if+%7Dt%5Cin+A%5C%5C+x_I%2C+%26+%5Ctext%7B+if+%7Dt%5Cin+I%2C+I%5Cin+C%28%5B0%2C1%5D%5Cbackslash+A%29%5Cend%7Bcases%7D&bg=ffffff&fg=333333&s=0&c=20201002)
In other words, 
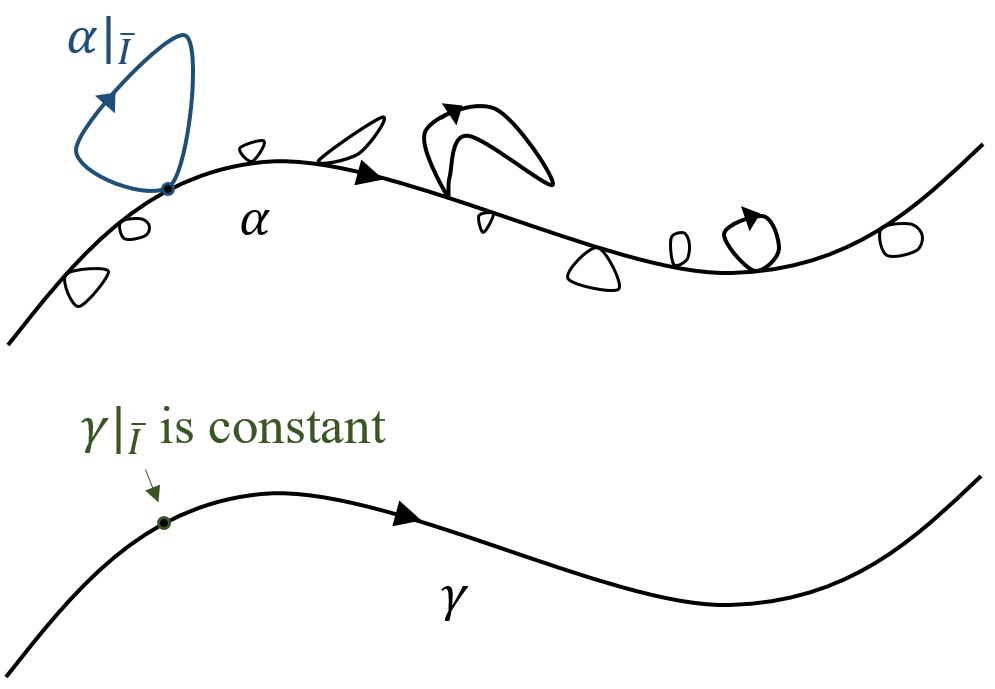
Altering a path to be constant on a given (possibly infinite) family of subloops.
Because 

Now this new pinch-off lemma is, in a way, much stronger than our first lemma. But we must be responsible with all this power. It just says that we can always pinch of subloops to obtain some continuous path. It doesn’t say that the result will be homotopic to the original….The resulting path will be “obviously” path-homotopic to the original only if we’re pinching off just finitely many null-homotopic subloops.
Maximal Cancellations
Definition 5: A cancellation of a path 

Let 




Definition 6: A cancellation 

Observation 7: If 

![\alpha_{[a,c]}\simeq \alpha_{[a,b]}\cdot \alpha_{[b,c]}](https://s0.wp.com/latex.php?latex=%5Calpha_%7B%5Ba%2Cc%5D%7D%5Csimeq+%5Calpha_%7B%5Ba%2Cb%5D%7D%5Ccdot+%5Calpha_%7B%5Bb%2Cc%5D%7D&bg=ffffff&fg=333333&s=0&c=20201002)





So, we want to know two things:
- When does a path
- If
, must
We’ll work to answer these questions in Part II.
References:
[1] J.W. Cannon, G.R. Conner, On the fundamental groups of one-dimensional spaces, Topology Appl. 153 (2006) 2648–2672.
[2] M.L. Curtis, M.K. Fort, Jr., The fundamental group of one-dimensional spaces, Proc. Amer. Math. Soc. 10 (1959) 140–148.
[3] K. Eda, The fundamental groups of one-dimensional spaces and spatial homomorphisms, Topology Appl. 123 (2002) no. 3, 479-505.

Pingback: Homotopically Reduced Paths (Part II) | Wild Topology
Pingback: Homotopically Reduced Paths (Part III) | Wild Topology